Diagram Energi dan Kesetimbangan Sebuah System
 |
| Sistem balok-pegas |
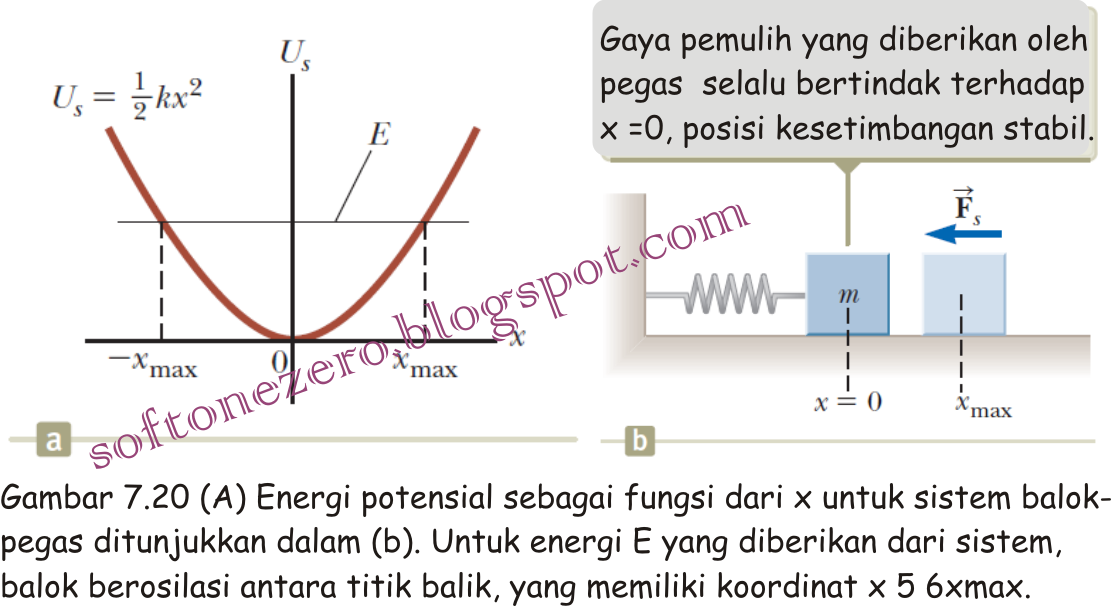
Gerak sistem sering dapat dipahami secara kualitatif melalui grafik energi potensialnya terhadap posisi anggota dari sistem. Perhatikan fungsi energi potensial untuk sistem balok-pegas, yang diberikan oleh Us = ½ kx2.
|
|
| Grafik untuk partikel dengan kesetimbangan stabil |

Fungsi ini diplot terhadap x dalam Gambar 7.20a, di mana x adalah posisi balok. Gaya Fs diberikan oleh pegas pada balok berhubungan dengan Us melalui Persamaan 7.28:

Seperti yang kita lihat dalam Quiz cepat 7,8, komponen x gaya adalah sama dengan negatif dari kemiringan kurva U-versus-x. Ketika balok ditempatkan saat diam pada posisi setimbang (x=0), di mana Fs = 0, itu akan tetap di sana kecuali beberapa gaya eksternal Fext bertindak di atasnya. Jika gaya eksternal ini membentangkan pegas dari kesetimbangan, x adalah positif dan kemiringan dU/dx adalah positif, karena itu, gaya Fs yang diberikan oleh pegas adalah negatif dan balok dipercepat kembali ke x = 0 ketika dilepas. Jika gaya eksternal menekan pegas, x adalah negatif dan kemiringan adalah negatif, karena itu, Fs positif dan juga massa dipercepat dengan arah x = 0 pada saat dilepas.
Dari analisis ini, kita menyimpulkan bahwa x = 0 posisi untuk sistem balok-pegas adalah salah satu kesetimbangan yang stabil. Artinya, gerakan apapun dari posisi ini menghasilkan gaya yang diarahkan kembali ke x = 0. Secara umum, konfigurasi sistem dalam kesetimbangan yang stabil sesuai dengan koresponden U(x) untuk sistem ini adalah minimum.
Jika balok pada Gambar 7.20 dipindahkan ke posisi awal xmaxdan kemudian dibebaskan dari keadaan awal, energi total awalnya adalah energi potensial ½ kxmax2 yang tersimpan pada pegas. Saat balok mulai bergerak, sistem memperoleh energi kinetik dan kehilangan energi potensial. Balok berosilasi (bergerak bolak-balik) antara dua titik x = -xmax dan x = + xmax, yang disebut titik balik. Bahkan, karena tidak ada energi yang diubah menjadi energi internal akibat gesekan, balok berosilasi antara -xmax dan +xmaxselamanya. (Kita akan membahas osilasi ini lebih lanjut dalam Bab 15.)
Sistem mekanis sederhana lainnya dengan konfigurasi kesetimbangan yang stabil adalah bola menggelinding di sekitar dasar mangkuk. Suatu waktu bola dipindahkan dari posisi terendah, ia cenderung untuk kembali ke posisi itu ketika dilepaskan.
Sekarang perhatikan partikel bergerak sepanjang sumbu x di bawah pengaruh gaya konservatif Fx, di mana kurva U-versus-x seperti yang ditunjukkan pada Gambar 7.21. Sekali lagi, Fx = 0 pada x = 0, sehingga partikel berada dalam keadaan setimbang di titik ini. Posisi ini, bagaimanapun, adalah salah satu dari kesetimbangan tak stabil karena alasan berikut. Misalkan partikel tersebut dipindahkan ke kanan (x > 0). Karena kemiringan negatif untuk x> 0, Fx = -dU/dx adalah positif dan partikel dipercepat jauh dari x = 0. Jika bukan partikel berada pada x = 0 dan berpindah ke kiri (x < 0), gaya adalah negatif karena kemiringan yang positif untuk x < 0 dan partikel berakselerasi lagi dari posisi kesetimbangan. Posisi x = 0 dalam situasi ini adalah salah satu kesetimbangan tak stabil karena untuk setiap perpindahan dari titik ini, gaya mendorong partikel jauh dari keseimbangan dan menuju posisi energi potensial yang lebih rendah. Sebuah pensil seimbang di titik berada dalam posisi kesetimbangan tak stabil. Jika pensil tersebut dipindahkan sedikit dari posisi benar-benar vertikal dan kemudian dilepaskan, itu pasti akan jatuh. Secara umum, konfigurasi sistem dalam kesetimbangan tak stabil sesuai dengan koresponden U(x) untuk sistem ini maksimal.
Akhirnya, konfigurasi yang disebut keseimbangan netral muncul ketika U adalah konstan selama beberapa wilayah. Perpindahan kecil dari sebuah objek dari posisi di wilayah ini tidak mengembalikan atau mengganggu gaya. Sebuah bola tergeletak di permukaan yang datar horisontal adalah contoh dari suatu obyek dalam kesetimbangan netral (Serway, 2010:187-188).