ROTASI DARI OBYEK PADAT DI SEKITAR SUMBU TETAP
Bab 10
Rotasi dari Obyek padat di Sekitar sumbu Tetap
10.1 Posisi, Velocity, dan Percepatan sudut
10.2 Analisis Model: Obyek kaku Dalam Percepatan sudut Konstan
10.3 Sudut dan Besaran Translasional
10.4 Energi Kinetik Rotasi
10.5 Perhitungan Momen Inersia
10.6 Torsi
10.7 Analisis Model: Obyek kaku Berdasarkan Torsi Total
10.8 Pertimbangan Energi dalam Gerak Rotasi
10.9 Gerak Rolling dari Obyek Kaku
Ketika berurusan dengan benda berputar, analisis sangat disederhanakan dengan mengasumsikan objek kaku. Sebuah objek kaku adalah salah satu yang nondeformable (tak dapat berubah bentuk), yaitu lokasi relatif semua partikel objek yang tersusun tetap konstan. Semua benda nyata deformable sampai batas tertentu, model objek kaku kita, bagaimanapun, adalah berguna dalam banyak situasi di mana deformasi (perubahan bentuk) diabaikan. Kita telah mengembangkan model analisis berdasarkan partikel dan sistem. Dalam bab ini, kita memperkenalkan kelas lain dari model analisis berdasarkan model objek yang kaku.
10.1 Posisi, Kelajuan, dan Percepatan angular (sudut)
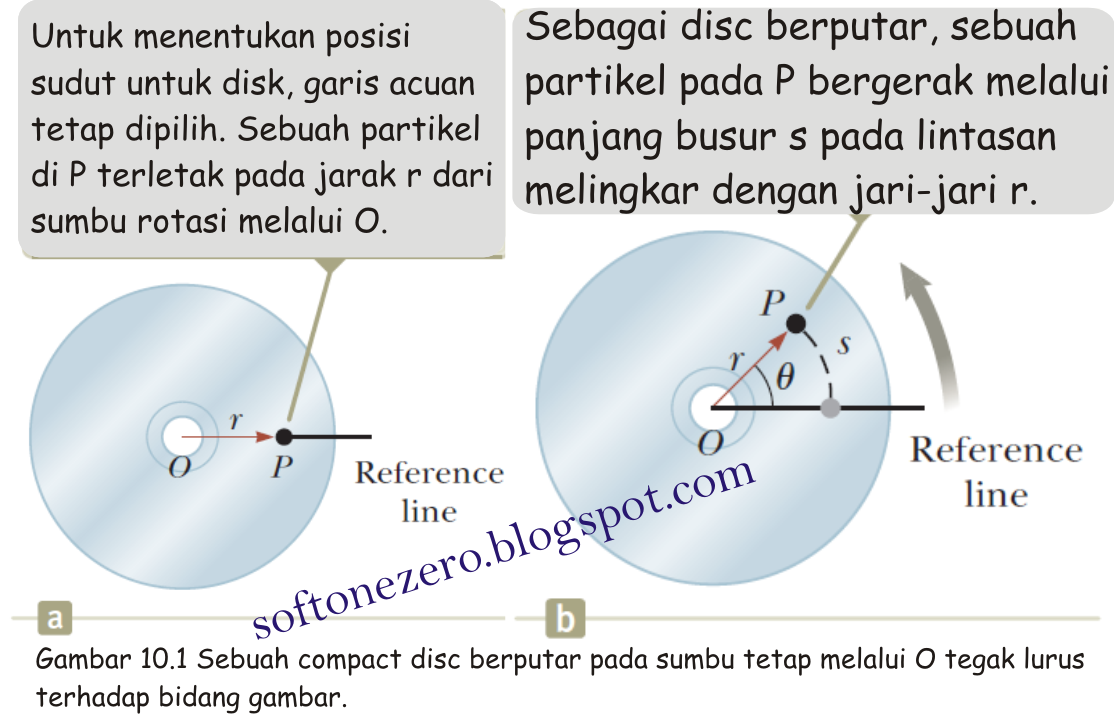
s = r q (10.1a)
q = s/r (10.1b)
Karena
q adalah rasio dari panjang busur dan jari-jari lingkaran, itu adalah angka murni. Biasanya, kita memberikan q satuan radian (rad), di mana satu radian adalah sudut subtended oleh panjang busur sama dengan radius busur. Karena keliling lingkaran adalah 2pr, maka dari Persamaan 10.1b bahwa 3600 disamakan dengan sudut (2pr / r) rad = 2p rad. Oleh karena itu, 1 rad = 3600/2p @57,38. Untuk mengkonversi sudut dalam derajat ke sudut dalam radian, kita menggunakan p rad = 1800, sehinggaKarena disk dalam Gambar 10.1 adalah objek yang kaku, sebagai partikel bergerak melalui sudut
q dari garis acuan, setiap partikel lainnya pada objek berputar melalui sudut q yang sama. Oleh karena itu, kita dapat mengasosiasikan sudut q dengan seluruh objek yang kaku serta dengan partikel individu, yang memungkinkan kita untuk menentukan posisi sudut dari objek yang kaku dalam gerak rotasi. Kita memilih garis acuan pada objek, seperti garis yang menghubungkan O dan partikel yang dipilih pada objek. Posisi sudut dari objek yang kaku adalah sudut q antara garis acuan ini pada objek dan garis acuan tetap dalam ruang, yang sering dipilih sebagai sumbu x. Identifikasi seperti ini mirip dengan cara kita menentukan posisi obyek dalam gerak translasi sebagai jarak x antara objek dan posisi acuan, yang merupakan titik asal, x = 0. Oleh karena itu, sudut q memainkan peran yang sama dalam gerak rotasi yang merupakan posisi x dalam gerak translasi.Sebagai partikel tersebut pada objek kaku perjalanan dari posisi Ake posisi B dalam interval waktu ∆t seperti pada Gambar 10.2, garis acuan tetap ke objek menyapu sudut ∆
q = qf – qi. Besaran ini didefinisikan sebagai perpindahan sudut dari objek yang kaku:Tingkat di mana perpindahan sudut ini terjadi dapat bervariasi. Jika objek yang kaku berputar cepat, perpindahan ini dapat terjadi dalam selang waktu yang singkat. Jika rotasi perlahan, perpindahan ini terjadi dalam interval waktu yang lebih lama. Besaran rotasi ini yang berbeda dapat diukur dengan menentukan kecepatan rata-rata sudut
wavg (omega huruf Yunani) sebagai rasio perpindahan sudut dari objek yang kaku untuk interval waktu ∆t selama perpindahan terjadi:vavg =
Dalam analogi kecepatan translasi, yang seketika sudut kecepatan
w didefinisikan sebagai limit kecepatan sudut rata-rata sebagai ∆t mendekati nol:Kecepatan sudut memiliki satuan radian per detik (rad/s), yang dapat ditulis sebagai s-1 karena radian tidak memiliki dimensi. Kita mengambil
w menjadi positif ketika q meningkat (gerak berlawanan jarum jam pada Gambar. 10.2) dan negatif ketika q menurun (gerak searah jarum jam pada Gambar. 10.2).
Jika kecepatan sudut sesaat dari suatu objek berubah dari vi menjadi vf dalam interval waktu ∆t, objek memiliki percepatan sudut. Percepatan sudut rata-rata aavg (huruf Yunani alpha) dari objek yang berputar kaku didefinisikan sebagai rasio perubahan kecepatan sudut untuk interval waktu ∆t selama perubahan dalam kecepatan angular terjadi:
aavg º ![]() =
= ![]() (10.4)
(10.4)
Dalam analogi percepatan translasi, percepatan sudut sesaat didefinisikan sebagai limit dari percepatan sudut rata-rata sebagai pendekatan ∆t nol:
a º ![]() =
= ![]() (10.5)
(10.5)
Percepatan sudut memiliki satuan radian per detik kuadrat (rad/s2), atau hanya s-2. Perhatikan bahwa positif jika benda kaku berputar berlawanan arah jarum jam dengan kecepatan meningkat atau jika benda kaku berputar searah jarum jam dengan kecepatan melambat selama beberapa interval waktu.
Jika benda kaku berputar pada sumbu tetap, setiap partikel pada objek berputar melalui sudut yang sama dalam interval waktu tertentu dan memiliki kecepatan sudut yang sama dan percepatan sudut yang sama. Oleh karena itu, seperti posisi sudut q, besaran w dan aciri gerakan rotasi obyek kaku seluruh serta partikel individu dalam objek.
Posisi sudut (q), kecepatan sudut (w), dan percepatan sudut (a) adalah analog dengan posisi translasi (x), kecepatan translasi (v), dan percepatan translasi (a). Variabel q, w, dan a berbeda dimensi dari variabel x, v, dan a hanya dengan faktor memiliki satuan panjang. (Lihat Bagian 10.3.)
Kita belum menentukan arah untuk kecepatan sudut dan percepatan sudut. Tegasnya, w dan aadalah besaran dari vectors kelajuan sudut dan percepatan sudut masing-masing w dan a, dan mereka harus selalu positif. Karena kita sedang mempertimbangkan rotasi pada sumbu tetap, bagaimanapun, kita dapat menggunakan notasi nonvector dan menunjukkan arah vektor dengan memberikan tanda positif atau negatif terhadap w dan aseperti yang dibahas sebelumnya berkaitan dengan Persamaan 10.3 dan 10.5. Untuk rotasi pada sumbu tetap, satu-satunya arah yang secara unik menentukan gerak rotasi adalah arah sepanjang sumbu rotasi. Oleh karena itu, arah w dan aberada di sepanjang sumbu ini. Jika partikel berputar dalam bidang xy seperti pada Gambar 10.2, arah w untuk partikel yang keluar dari pesawat dari diagram ketika rotasi berlawanan dan pada bidang diagram ketika rotasi searah jarum jam. Untuk menggambarkan konvensi ini, akan lebih mudah untuk menggunakan aturan tangan kananditunjukkan dalam Gambar 10.3. Ketika keempat jari tangan kanan yang digenggam dalam arah rotasi, diperpanjang jempol kanan ke arah w. Arah dari a mengikuti dari definisi aºdw/dt. Hal ini dalam arah yang sama dengan w jika kecepatan sudut meningkat dalam waktu, dan itu adalah antiparalel untuk w jika kecepatan sudut menurun dalam waktu (Serway, 2010:277-280).